安川下肢康復訓練機器人:專業的康復醫療設備
更新時間:2023-12-25 14:14:01 關鍵詞:復訓練機器人 安川下肢康復訓練機器人
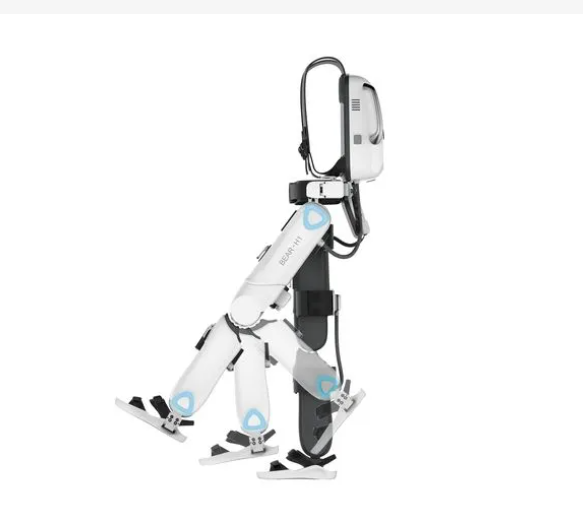
隨著科技的不斷進步,機器人技術在醫療領域發揮著越來越重要的作用。其中,安川下肢康復訓練機器人作為一項先進而有效的康復輔助設備,被廣泛應用于康復醫學領域。該機器人利用其準確控制的動作執行能力,能夠幫助患者恢復下肢功能,提供個性化康復訓練。

1. 機器人結構與工作原理
安川下肢康復訓練機器人主要由底座、機器人臂、可調節支架、腳板、傳感器等組件構成。其工作原理基于力矩控制和運動學算法。患者通過穿戴機器人的腳板,機器人臂能夠準確地感知到患者的動作,并根據患者的情況提供相應力矩,實現康復訓練。
2. 康復訓練模式與功能
安川下肢康復訓練機器人提供多種康復訓練模式,包括主動訓練、被動訓練和輔助訓練。主動訓練模式下,患者通過自己的力量進行康復訓練,提高下肢肌肉力量和協調性;被動訓練模式下,機器人通過自動控制提供恒力矩,幫助患者進行被動運動;輔助訓練模式下,機器人能夠根據患者的運動狀態進行實時調整,提供力矩輔助,幫助患者恢復正常步態。
此外,安川機器人還具備運動范圍調節、速度調節、力矩控制等功能,可以根據患者的個體差異和康復階段進行個性化的康復訓練,提高訓練效果。
3. 康復訓練效果與優勢
安川下肢康復訓練機器人的應用顯著提高了下肢康復訓練的效果。其主要優勢包括:
3.1 高精度的運動控制:機器人能夠提供準確的力矩控制,保證康復訓練的準確性和安全性。
3.2 個性化的康復訓練:機器人可以根據患者的個體差異和康復需求進行個性化訓練,提高訓練效果。
3.3 實時反饋與監控:機器人能夠實時監測患者的運動狀態,并提供實時反饋,幫助患者糾正錯誤動作,加強訓練效果。
3.4 增加患者積極性:機器人提供多樣化的康復模式和互動界面,激發患者的積極性,增加康復訓練的樂趣。
4. 安川下肢康復訓練機器人臨床應用
安川下肢康復訓練機器人已在臨床康復領域得到廣泛應用。它可用于中風康復、脊髓損傷康復、骨科手術后康復等多種場景。通過與醫師、康復師的協同配合,機器人能夠為患者提供個性化的康復方案,幫助患者快速恢復下肢功能。
5. 結論
安川下肢康復訓練機器人的應用為下肢康復提供了新的解決方案。它的高精度運動控制和個性化訓練模式使得康復訓練更加準確和有效。